2021-06-12
Sols 53-64 Van Zyl Overlook 360° Panorama Released
Contributed by Jim Bell
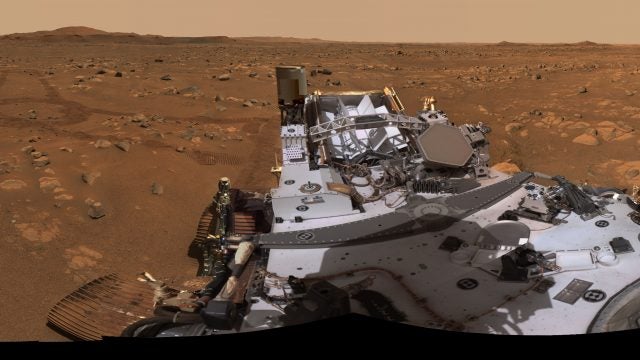
It took weeks of advance planning, a dozen sols on Mars to acquire, and then many more weeks to calibrate, process, and tweak, but this week the Perseverance Mastcam-Z “Van Zyl Overlook” 360-degree panorama was finally finished and shared with the world!
This mosaic has been dubbed the Van Zyl Overlook panorama because it was taken from a location near the Octavia E. Butler landing site named Van Zyl Overlook, where the rover was parked during the Ingenuity helicopter’s initial flights. Van Zyl Overlook is named after the late NASA/JPL Director for Solar System Exploration Jakob J. Van Zyl, who played a major role in the advocacy and development of many NASA robotic solar system missions, including Mars 2020 and the Ingenuity helicopter tech demo mission. I knew and worked with Jakob on a variety of projects, and I miss us being able to share stories with each other about our successes and challenges. I’m glad that the Mars 2020 team has decided to memorialize Jakob’s important contributions to the mission by naming an important early mission locale after him. And it’s an honor for the Mastcam-Z team to name this spectacular and unprecedented panoramic view of our Jezero crater environs after him as well.
We took the individual pieces of this 360-degree panorama between mission sols 53 and 64 (April 14-25, 2021), while Perseverance was parked at Van Zyl Overlook during the first five flights of the Ingenuity helicopter. We knew in advance that the rover would need to remain parked in one place for several weeks to a month during the helicopter’s technology demonstration flights, to guarantee clear and stable line-of-sight radio communications between the two spacecraft, as well as to enable us to have a great view of the take-off and landing zones so that we could help document the flights (hopefully you’ve seen examples of the spectacular movies the Mastcam-Z team took of Ingenuity in flight — more on that coming in a new blog soon!)
Over the course of those 12 sols in mid- to late-April, the Mastcam-Z uplink team at Malin Space Science Systems, Inc. wrote the commands for 12 different sequences that methodically moved Perseverance’s Remote Sensing Mast in small increments of azimuth and elevation that were designed to “paint” the entire scene around the rover with overlapping Mastcam-Z images. We took the images at our highest zoom level (110-mm focal length), which yields an image scale from about 0.16 mm per pixel (0.006 inches per pixel) on the ground right in front of the rover and closest to the cameras, out to about 13 cm/pix (5.1 in/pix) for features a few kilometers away, like the front ridge of the Jezero delta to the north. The actual resolution of the images — the smallest features that we can typically resolve and recognize — is something like 3 to 5 times those pixel scale numbers. At that maximum resolution, our field of view is very small, only about 5° high by 6° wide, a little smaller than the field of view of a typical pair of 10×42 binoculars. Once all the individual images were downlinked, they were processed and calibrated by the downlink teams at JPL, ASU, and Cornell, and were then ready to be mosaicked.
The animated GIF file below, put together by my JPL Perseverance rover team colleague Jason Van Beek, shows a sort of “brick by brick” pointing reconstruction of how the Van Zyl Overlook panorama was taken by Mastcam-Z:

For most of these “bricks” we took both a left camera image and a right camera image at the same time, so we will eventually produce a stereo view of the entire scene. The full Mastcam-Z right camera mosaic, which is the one that we’ve finished to date and released on the JPL, NASA, and YouTube web sites, was constructed from 992 individually pointed images. The full Mastcam-Z left camera mosaic, which we are still working to process and map-project, was constructed from 971 individually pointed images. Some small parts of the ground close to the rover are only visible by one or the other camera, which is why the total number of images per camera in the final mosaics is not the same. We’ve made versions of the panorama without the rover in the scene — using the images taken just by Mastcam-Z — as well as with the rover superimposed into the scene for scale and context — using “selfie” images of the rover deck taken by the Navcam cameras on Sol 31, when the rover first arrived at the parking spot that would eventually be named Van Zyl Overlook. Both versions of these mosaics are enormous — more than 2.4 billion pixels each! Someone check me on this, but I think these might be the largest mosaics ever acquired in the long history of Mars surface exploration.
Much of the work assembling that mosaic and massaging the seams between some of the adjacent sequences taken at very different local times of sol on Mars, was done by my Cornell Mastcam-Z colleague Jonathan Joseph. Jonathan is the creator of the amazing customized map projection software that we use to create mosaics from individual Mastcam-Z images. This is a modified and updated version of the software that he wrote to make the spectacular collection of mosaics and panoramas taken by the Spirit and Opportunity Pancam cameras going back to 2004 (see ASU’s collection of those mosaics at this link, and 360° panoramas at this link). Jonathan spent many painstaking hours adjusting brightness levels, gradients, and contrast from image-to-image in the Van Zyl mosaic to make it as “seamless” as possible.
The final tweaking and adjustment work for the YouTube AR (with SuperCam microphone soundtrack!) and Planetarium dome versions of the mosaic was performed by NASA/JPL Education Specialist and super-skilled image processing expert Jeffrey Nee. Jeff solved a number of the niggling seam problems that Jonathan and I were struggling with, and made the necessary mapping and format adjustments needed to allow the mosaic to be viewed in VR/AR headsets (like Oculus) and on spherical surfaces like planetarium domes.
We did run into some problems in the processing and mosaicking of this panorama. For example, a few small patches of near-field sand were obscured from view in the right Mastcam-Z camera by the MEDA wind sensor mounted on the rover’s mast — you can see the sensor as the white “finger” in Jason’s “brick-by-brick” animated GIF above, protruding up from the bottom of the mosaic about two-thirds of the way to the right edge. Luckily, the MEDA sensor covered a pretty bland and sandy part of the scene, so it was an easy “trick” to digitally insert the same piece of ground as viewed by the left Mastcam-Z (which was not obscured by the MEDA sensor) into the right eye mosaic. In addition, there were some small patches of ground right off the edge of the rover that weren’t covered at all in either the left or right Mastcam-Z mosaics. For those places, we used the sol 31 Navcam images that covered those parts of the ground at lower resolution to fill in the holes in the version of the panorama that includes the rover. The brightness of the sky also varied for images of the horizon taken over different sols and at different local solar times. So the sky was digitally smoothed and expanded based on the actual gradient of sky color observed as the panorama was being acquired on Mars. Luckily, there weren’t any clouds observed during any of the imaging sequences, so we didn’t have to “remove” them as part of that smoothing process…
Even though NASA policy is that individuals are not credited for their work on deep space images or other related media releases (instead, a generic “NASA/JPL-Caltech/ASU/MSSS” credit is used for these images, for example), I believe it’s important to recognize people like Jeff, Jonathan, and Jason, who have made significant individual contributions to the creation and public dissemination of space images like the Van Zyl Overlook panorama. Indeed, I would guess that there are something like 20-25 specific individuals who actually made this mosaic happen, from germination of the idea to posting of the final products. But, of course, those people are part of a team of many hundreds of scientists and engineers who keep the rover going every sol, and even those people are part of a much larger team of many thousands who worked to design, build, test, launch, and now operate this mission on Mars. As of this writing, nearly 350,000 people have viewed the YouTube AR version of this panorama. Being able to share our mission, our work, and the amazing vistas of the Red Planet with so many people is just incredibly rewarding!
At full resolution, the PNG and TIFF files available at the links below are more than 2 Gigabytes in size, making downloading and viewing them a significant challenge (but: see links to more manageable versions below!)
Here is a handy collection of links to use for your own viewing of this spectacular landscape:
Click here for the original NASA/JPL media release
Click here for the NASA/JPL Photojournal page for this panorama
The JPEG file used as the Feature Image of this blog entry is just a 1/10th scale low-resolution version of the full panorama. To download the full-resolution version, click the PNG or TIFF buttons provided on these links:
Van Zyl Overlook panorama, with rover
Van Zyl Overlook panorama, without rover
If the full-resolution files are too large for you to download or view/work with, here are some lower-resolution versions of the panorama with the rover that you can hopefully work with instead:
Click here for the Van Zyl Overlook with rover at 50% resolution (75 MByte JPEG file)
Click here for the Van Zyl Overlook with rover at 25% resolution (22 MByte JPEG file)
Click here for the Van Zyl Overlook with rover at 10% resolution (3 MByte JPEG file)
Here’s to you, Jakob, and the spectacular mission and vistas that you helped to bring to all of us…
ENJOY!!!